Model RPM-3011-ADP is a automated drum palletizing system that is versatile and cost effective. Our Drum Palletizer can handle steel, plastic and Fibre Drums with the same tool. Depending on the size of the robot, The RPM-3000 series palletizer can handle drums from 50 lbs to 2000lbs. RPM-3011-ADP Robot Drum Palletizer can be operational withing 6 to 8 weeks ARO.

Why Purchase a Palletizer today?
- Dramatically improve the health and safety of your employees
- Build higher stacks and reduce cost of shipping
- Increase output and deliver higher quality pallets
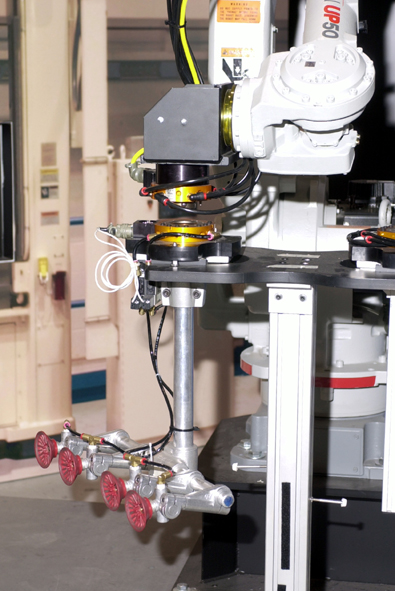
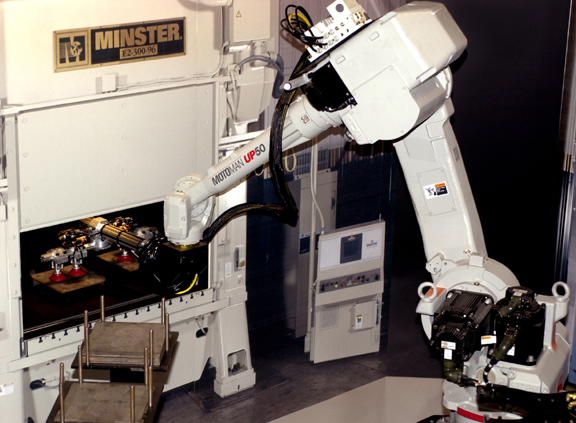
 ROBOT DRUM PALLETIZER
ROBOT DRUM PALLETIZER